Reinforcement Learning
- states
- actions
- rewards
- discount factor
: specifies the relevance in the present of future rewards. - return
: cumulative reward - policy
: a specification of how the agent acts. gives the probability of taking action when in state .
The goal of reinforcement learning is to choose a policy
RL Overview
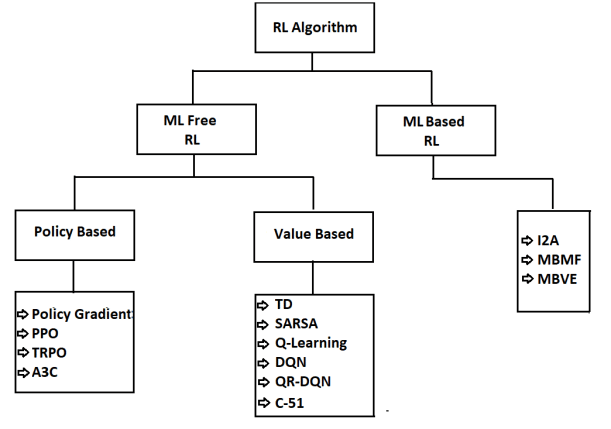
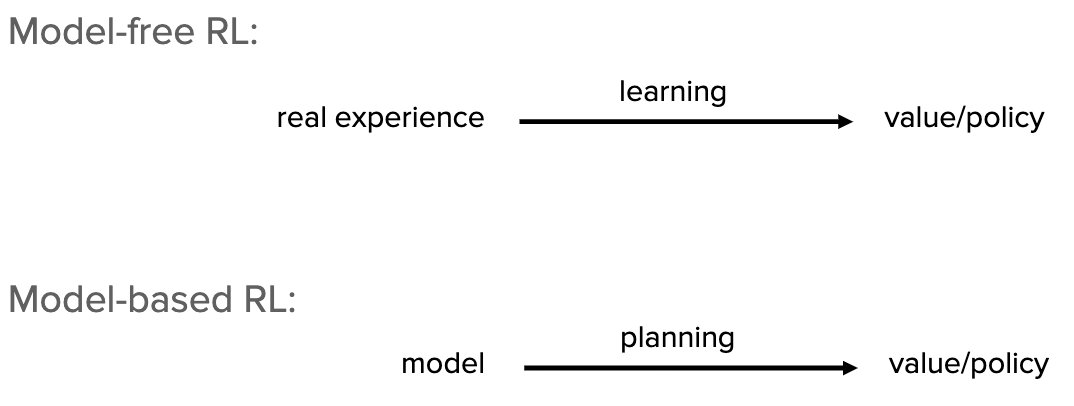
Model-based vs. Model-free RL
Value-based vs. Policy-based RL
differs in the types of algorithms used to derive the optimal behavior
- Value-based RL: estimates the expected cumulative reward (i.e. value) of being a certain state and choosing to take a certain action
- Policy-based RL: learns the policy to optimize a parametrized policy function with gradient ascent to maximize the expected cumulative reward
Off-policy vs. On-policy methods
differs in whether the agent is using the newest policy that is being updated
- Off-policy methods
- estimate values that are not based on the agent's current policy. Most often, values are estimated under the assumption of optimal future behavior (i.e. optimal policy).
- Q-learning is an example of off-policy learning algorithm.
- On-policy methods
- estimate values under the agent's current policy, including possible randomness/stochasticity in future behavior (e.g. ε-greedy)
- SARSA (State-Action-Reward-State-Action) is an example of on-policy learning algorithm
- note not all policy-based RL are on-policy
Q-Learning
It is a type of reinforcement learning: model-free. value-based, and off-policy
Concepts
- Q value: the expected cumulative reward for taking an action in a particular state.
- State-action value function (Q function)
- it specifies how good it is for an agent to perform a particular action in a state with a policy
- Q function takes input of the state-action pairs and outputs the Q-values
- math forms: Q(s, a) = Return, if you
- start in state
- take action(once, to )
- then behave optimally after that
- it specifies how good it is for an agent to perform a particular action in a state with a policy
- Bellman equation = the sum of reward at the current state and the return from behaving optimally starting from the state
:
How it works
- the agent selects the action with the highest Q-value in each state
- after each step, the policy is evaluated and the Q-values are updated using the Bellman equation
- the process is repeated until the policy converges and selects the same action at a given state
Algorithms
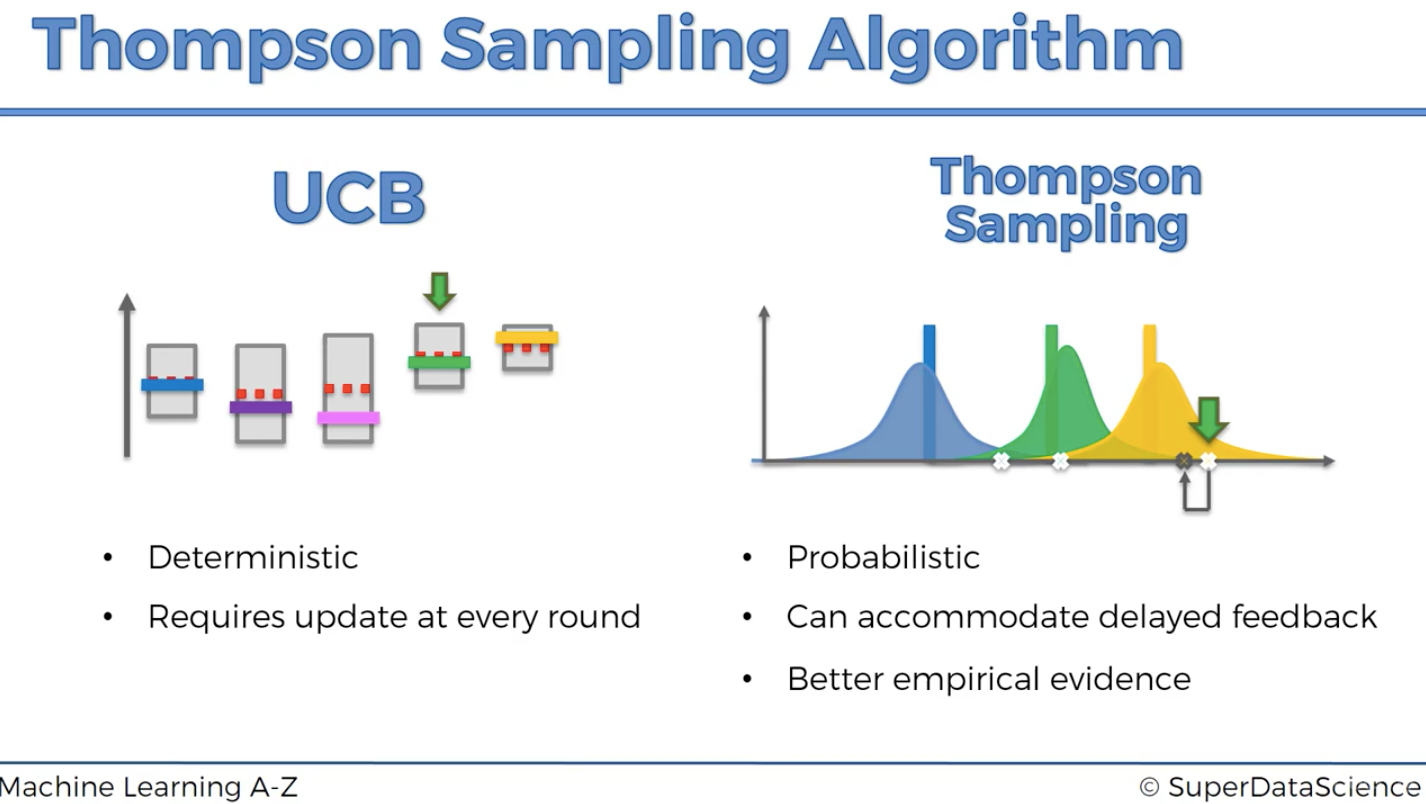
Upper Confidence Bound
UCB is a deterministic algorithm for Reinforcement Learning that focuses on exploration and exploitation based on a confidence boundary that the algorithm assigns to each machine on each round of exploration. These boundary decreases when a machine is used more in comparison to other machines.
example: which Ads customers will click on
How it works
- At each round n, we consider two numbers for machine m:
- N(n) = number of times the machine m was selected up to round n.
- R(n) = number of rewards of the machine m up to round n.
- From these two numbers we have to calculate,
- The average reward of machine m up to round n, $$r(n) = R(n) / N(n)$$
- The confidence interval
at round n with,
- We select the machine m that has the maximum
Intuitive explanation
https://medium.com/analytics-vidhya/upper-confidence-bound-for-multi-armed-bandits-problem-ea5d7bc840ff
Thompson Sampling (Bayesian Bandits)
How it works
- At each round n, we consider two numbers for machine m:
= number of times the ad got reward 1 up to round n. = number of times the ad got reward 0 up to round n.
- For each ad
, we take a random draw from the beta distribution below:
...until termination.